This year’s Colorado Space Grant Consortium (COSGC) Robotics Challenge was nothing short of incredible—and I’m proud to share that our team won Best in Class in the under 1.5kg category!
We competed against ten other university teams, each bringing their A-game, with robots built to tackle a simulated planetary terrain. As the president of our IEEE club and the team’s lead presenter, it was an honor to represent Colorado Mesa University on a stage filled with such innovative minds. Our presentation highlighted not only our design and build process, but also our problem-solving, teamwork, and iterative improvements that we pushed right up until the finish line.
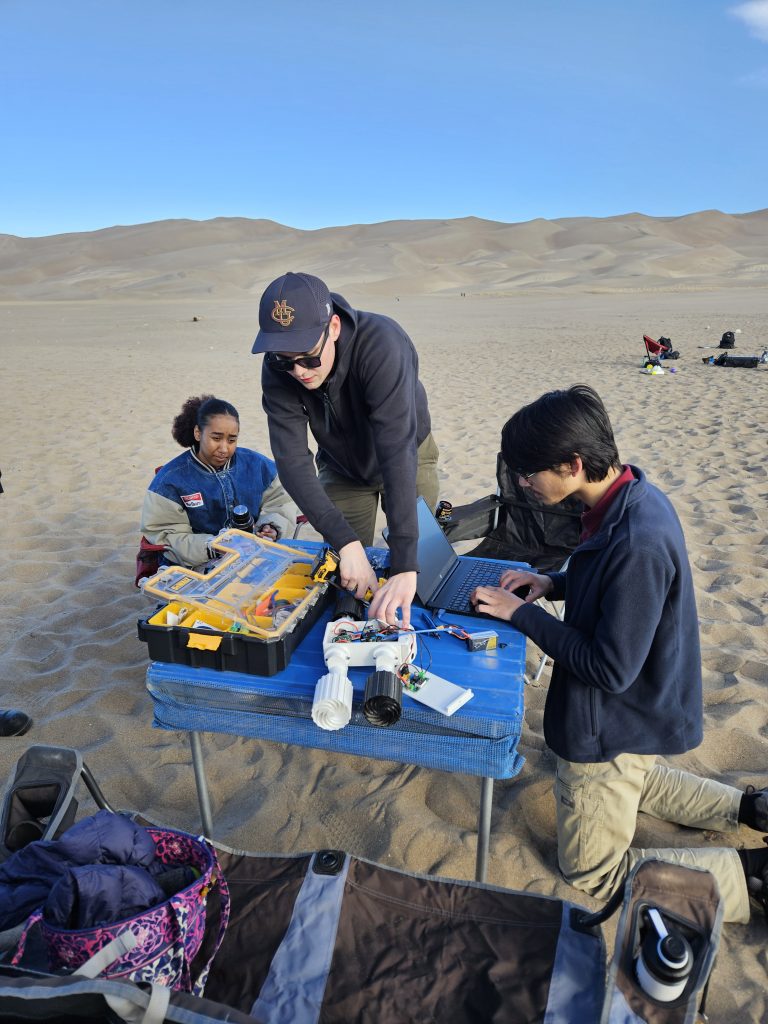
And when I say “finish line,” I mean it—our team stayed up in the hotel until 2AM the night before the event, huddled over the robot, soldering, coding, 3D printing last-minute tweaks, and perfecting the bot’s navigation logic. It was a grind, but it reminded me what engineering is really about: rapid learning, adaptation, and collaboration under pressure. That effort paid off.
Winning Best in Class was a proud moment, but the biggest takeaway wasn’t the trophy—it was everything we learned about how to grow and improve from here. As we reflect on the experience, a few key lessons stand out:
What We Learned
Testing early and often matters. Some of our challenges could’ve been caught sooner if we had done more iterative field testing.
Team communication is everything. Staying in sync, especially across sub-teams (hardware, software, design), is what helped us rally when it counted most.
Every failure is a chance to improve. We hit a lot of walls—both figurative and literal—and each one taught us something new about our bot and ourselves.
What’s Next
We’re already thinking ahead. There’s so much potential to evolve our robot beyond this first prototype. Ideas on the table:
Upgraded sensor array for more precise terrain detection
Swappable modules to test different locomotion strategies
Better cable management and power efficiency
Autonomous pathfinding logic using computer vision
This experience has energized our whole club. We’re looking to channel that momentum into future competitions, community outreach, and expanding opportunities for all students interested in robotics and engineering.
If you’ve been following our journey, thank you. This win is shared with everyone who supported us—professors, peers, family, and friends. And if you’re just tuning in, we’ve got a lot more coming. Stick around.
As part of my engineering journey at Colorado Mesa University, I had the opportunity to participate in the Colorado Space Grant Consortium (COSGC) robotic rover challenge. COSGC is a NASA-sponsored undergraduate research program that allows students to gain hands-on experience designing real-world aerospace systems.
Our team was tasked with designing, building, and testing a planetary rover prototype capable of navigating variable terrain, detecting obstacles, and collecting basic environmental data. The project culminates in a statewide competition on April 12th, held in the Great Sand Dunes National Park, where our rover will be evaluated on performance, robustness, and autonomy.
COSGC Program Overview & Design Reviews
The COSGC program isn’t just a student showcase—it mirrors real NASA engineering workflows. That includes multiple formal design reviews, held with COSGC program directors and engineering professors from the University of Colorado Boulder. Each review challenged us to justify our engineering decisions, present data and documentation, and respond to constructive criticism in a professional format.
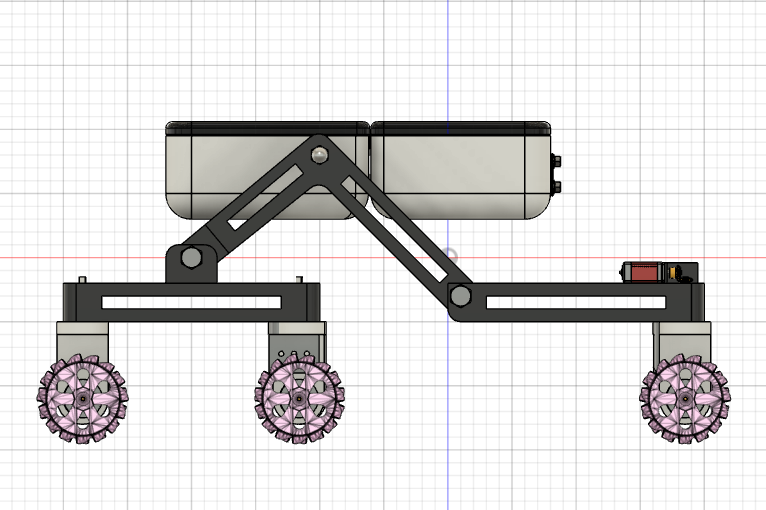
During our Initial Design Review (IDR), we proposed a rocker-bogie suspension system inspired by NASA’s own Martian rovers. Our presentation included 3D CAD renders, mechanical simulations, and wiring schematics.
Despite the ambition, the CU Boulder faculty raised valid concerns:
The design was mechanically complex
It exceeded the scope of our timeline and material constraints
It was prone to failure without precision-machined parts
Their advice: simplify, modularize, and focus on core function over form.
That feedback fundamentally shaped our approach. We went back to the drawing board and committed to building something reliable, testable, and modular.
Mechanical Architecture & Chassis Fabrication
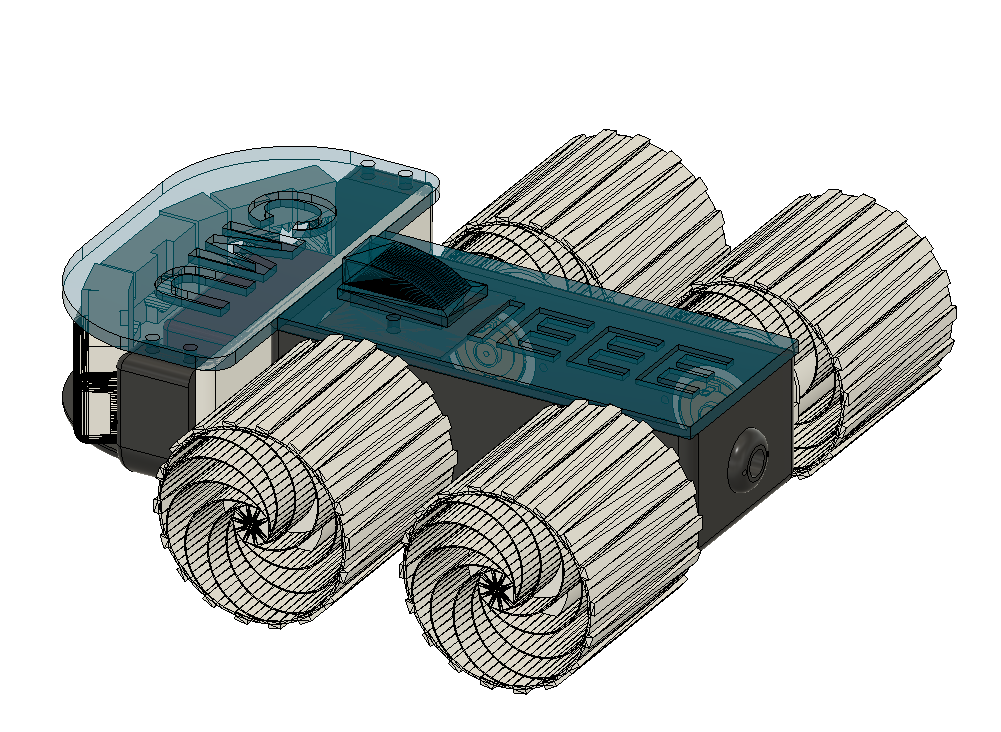
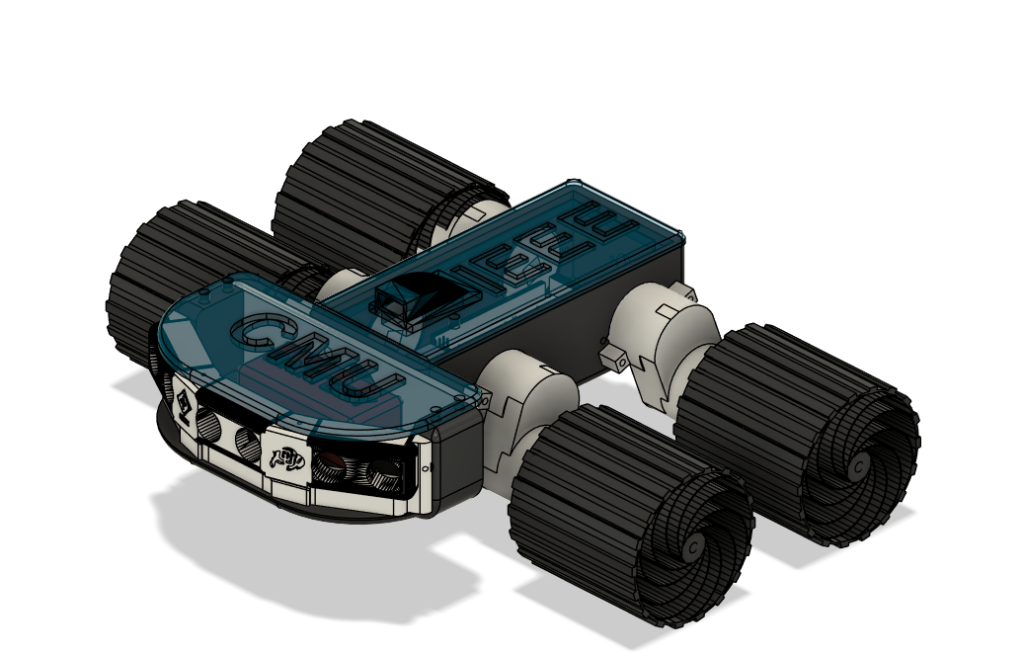
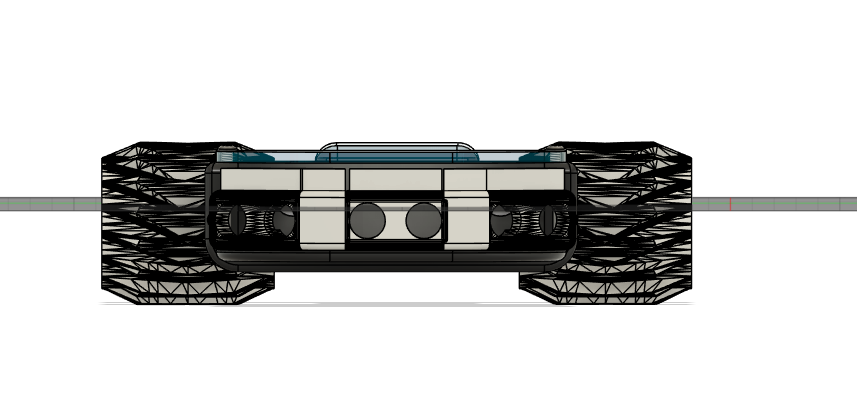
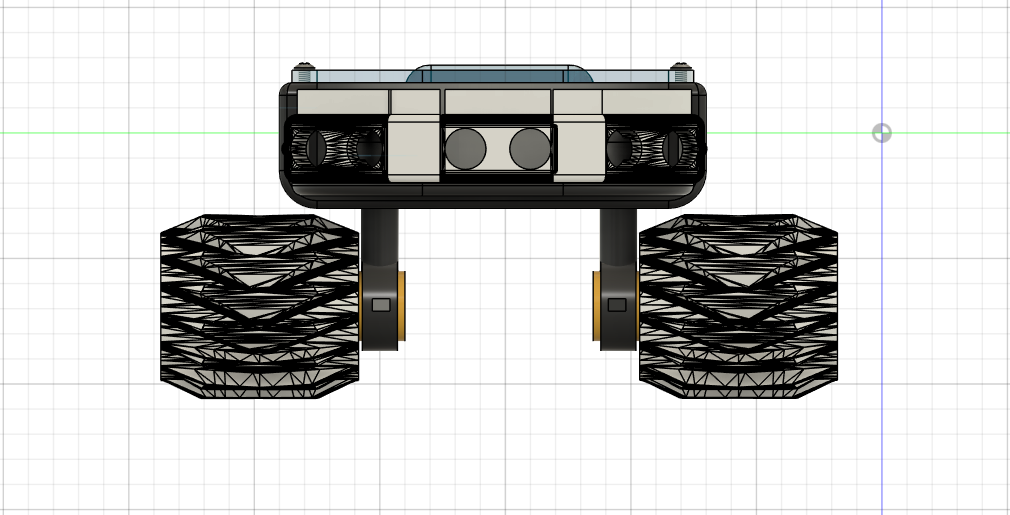
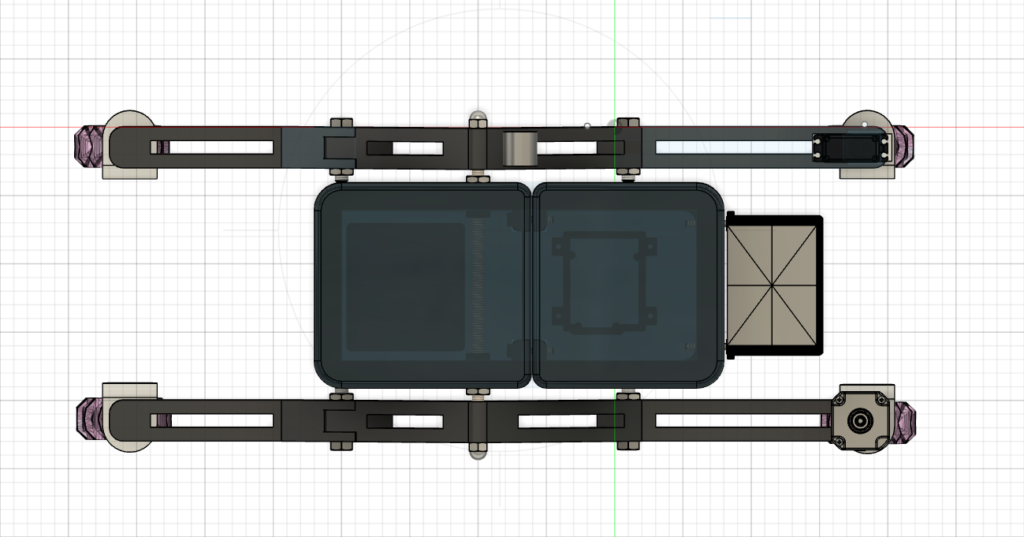
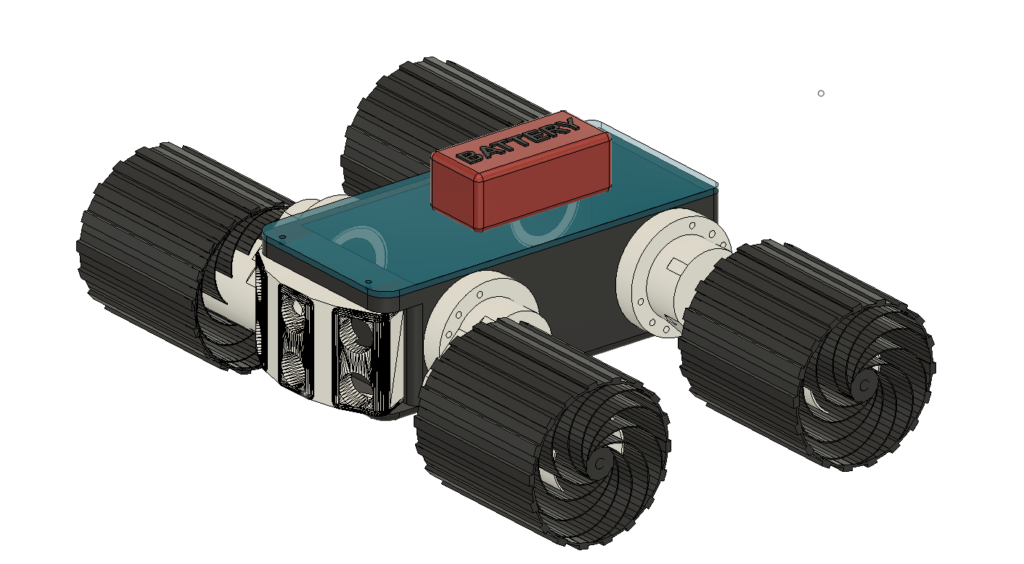
We pivoted to a skid-steer rover platform, opting for simplicity, robustness, and controllability. This involved four independently driven wheels, allowing the rover to turn by varying motor speeds on each side—similar to how a tank steers.
I took the lead on mechanical design and fabrication:
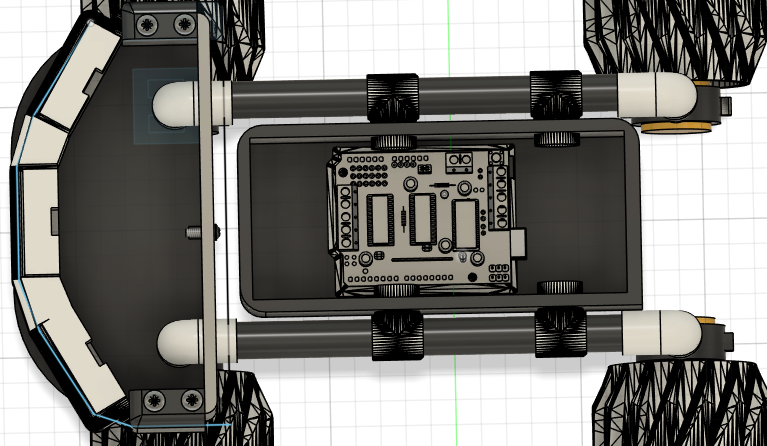
Designed the entire chassis in CAD, using Fusion 360
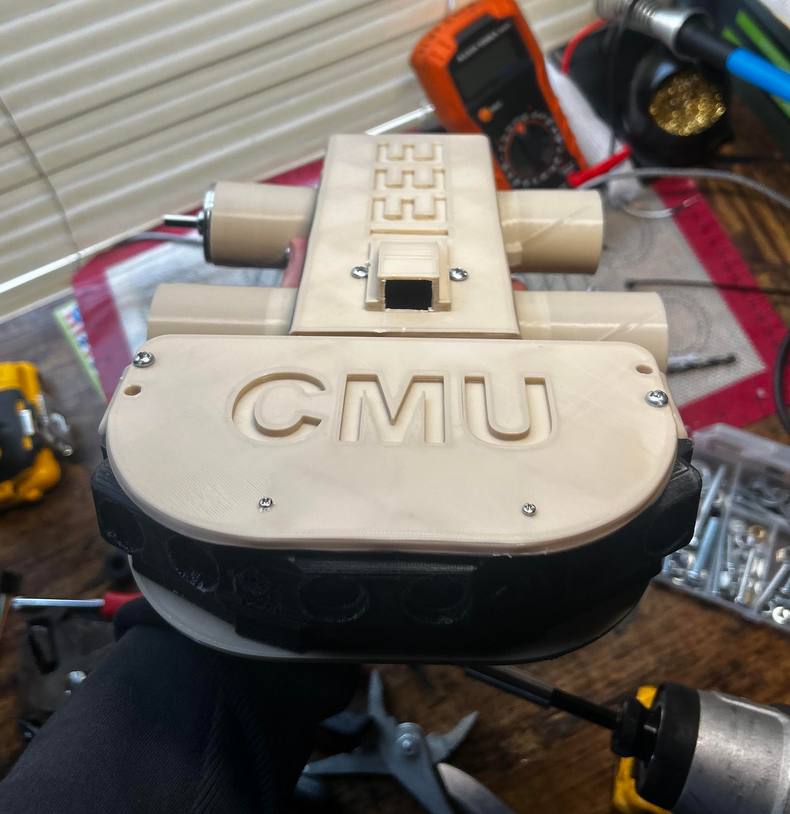
Built with custom 3D-printed components, reinforced with inserts for field service
Integrated quick-swap side panels for access to internal wiring and electronics
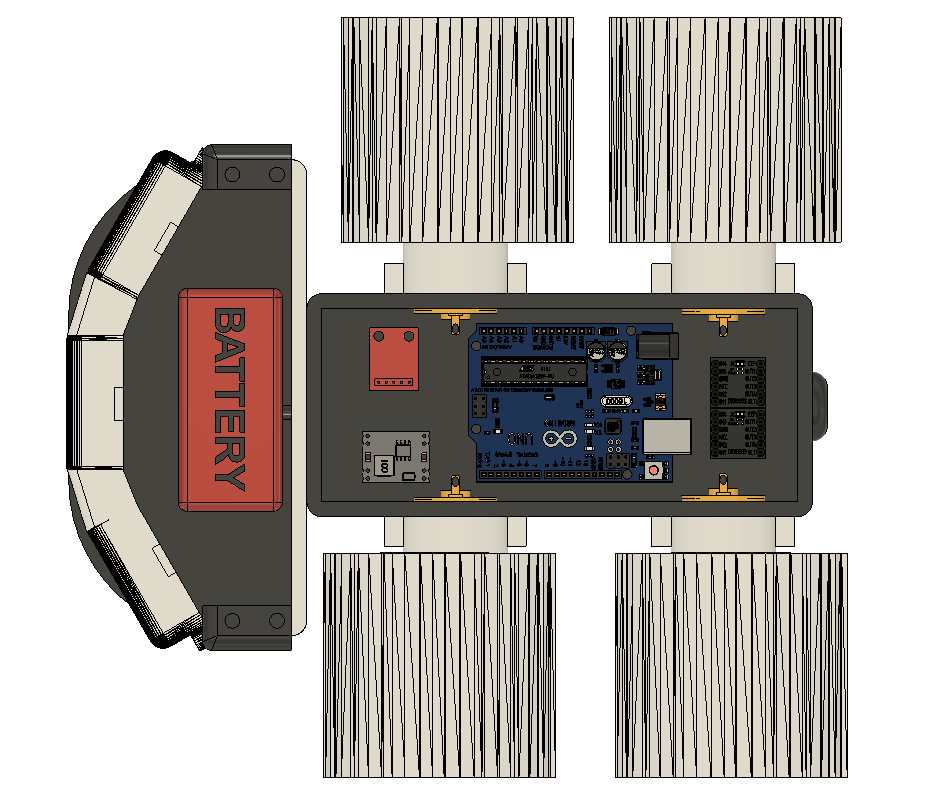
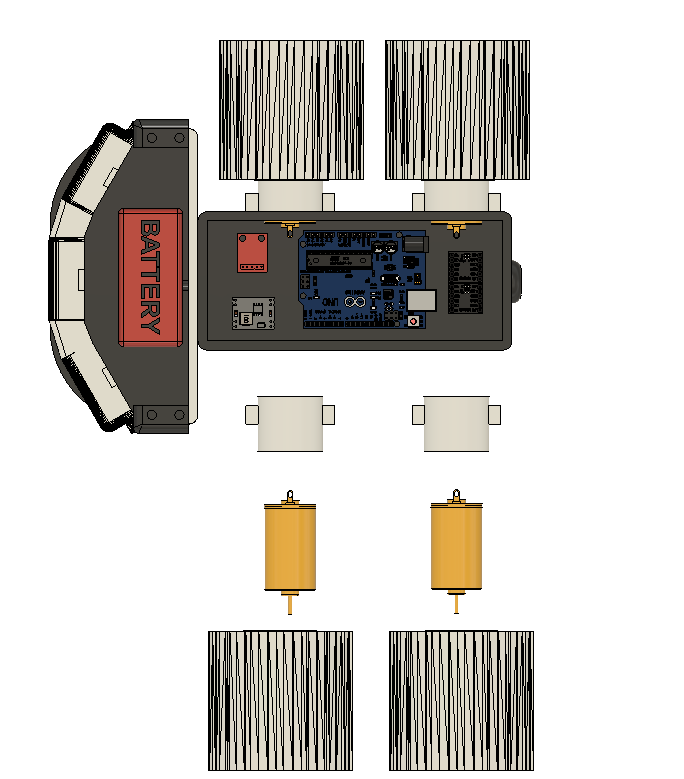
Designed mounts for sensors, drivers, battery, and power regulation components
The chassis is compact, rugged, and field-serviceable. It was designed to handle minor collisions, uneven terrain, and dusty environments while still being modular enough for in-field repairs.
Electrical System & Power Distribution
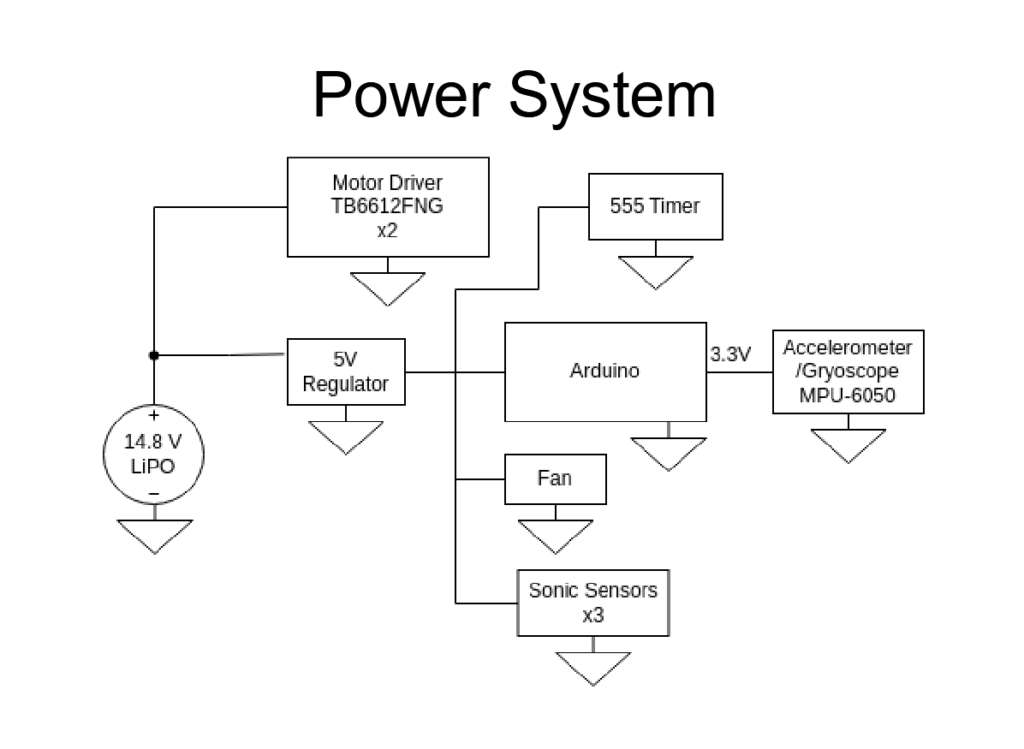
Our power system centered on a 14.8V LiPo battery, chosen for its energy density and current output. From there, the system branches into separate regulated paths:
5V Rail (via Buck Converter): powers Arduino, ultrasonic sensors, 555 timer circuit, and cooling fan
Motor Path: directly feeds two TB6612FNG motor drivers to control four DC motors
3.3V Line: powered through onboard regulation on the Arduino, used for I2C sensors like the MPU-6050
A key focus was power isolation and stability. All ground paths were linked via a star-grounding scheme, and capacitors were placed to buffer the regulators against voltage spikes.
Sensor Suite & Timing Logic
The rover’s autonomous capabilities rely on:
Three Ultrasonic Sensors (front-facing and angled sides)
MPU-6050 Accelerometer/Gyroscope for pitch/roll detection
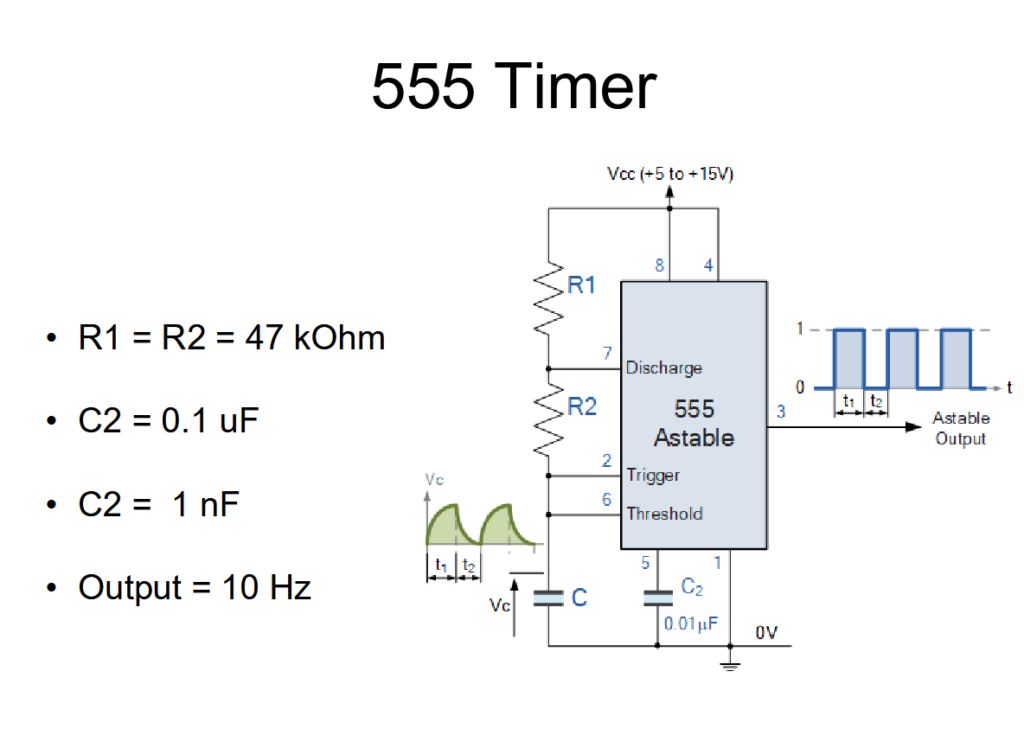
Custom 555 Timer Circuit generating consistent trigger pulses for the sensors
The 555 timer was configured in astable mode to produce a 10 Hz output signal. This ensured precise timing for ultrasonic trigger events, avoiding signal overlap or missed echoes.
555 Timer Circuit:
Embedded Code Architecture & Task Scheduling
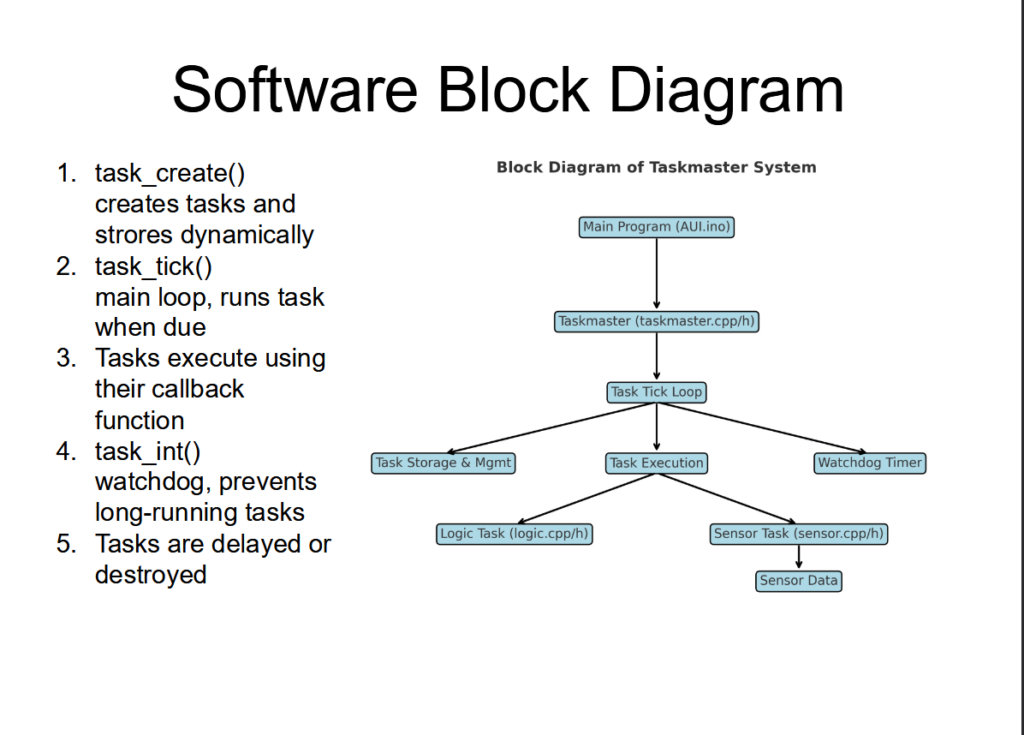
The software architecture was custom-built around a lightweight task manager written in C++. It breaks system behavior into manageable tasks:
task_create(): Registers new tasks
task_tick(): Called from the main loop, checks for due tasks
task_int(): Watchdog function to prevent system hangs
Callback functions handle sensor reads, motor control, and error handling
Each task runs independently, ensuring the system remains responsive even under load or in failure conditions.
Software Diagram:
This modular software approach made it easy to debug, tune, and expand behavior without affecting the main control loop.
Real-World Testing & Performance Tuning
We conducted testing in a variety of conditions:
Mulch beds for traction loss simulation
Gravel for bump and noise testing
Asphalt for precise turning calibration
Dirt hills to simulate the dunes
During testing, we monitored:
Motor balancing (one side drifting? Tune PWM)
Sensor blind spots (adjust mounting angles)
Temperature inside the chassis (verify fan effectiveness)
We ran real-time data logging through serial output and tested how the rover responded to obstacles, slopes, and fast motor reversals. We were able to change ultrasonic sensors and remount boards in under 2 minutes due to the modular design.
🏁 Final Prep for the Dunes
As of now, the rover is fully assembled, tested, and tuned for the Great Sand Dunes challenge on April 12th. The system is robust, modular, and engineered to be repairable in the field. Our documentation is ready, and our codebase is version-controlled and backed up.
This project pushed us to operate like real engineers. From design reviews with CU Boulder professors to rigorous hardware testing in real terrain, we developed:
Technical presentation skills
System-level thinking
Rapid prototyping and iteration workflows
We’re proud to represent Colorado Mesa University in a statewide NASA-backed competition—and we’re even prouder of what we built.