The past few months have been a mix of technical work, leadership, and finally getting some long-term projects across the finish line. A lot of what I’ve been doing has shifted from just building individual components to managing systems, teams, and real-world constraints.
IEEE Club & COSGC Rover
Alongside technical work, I’ve been managing the IEEE club, organizing meetings, planning workshops, and coordinating trips and outreach events. Balancing that with engineering work has been a challenge, but it’s also been a great way to build experience beyond just the technical side.
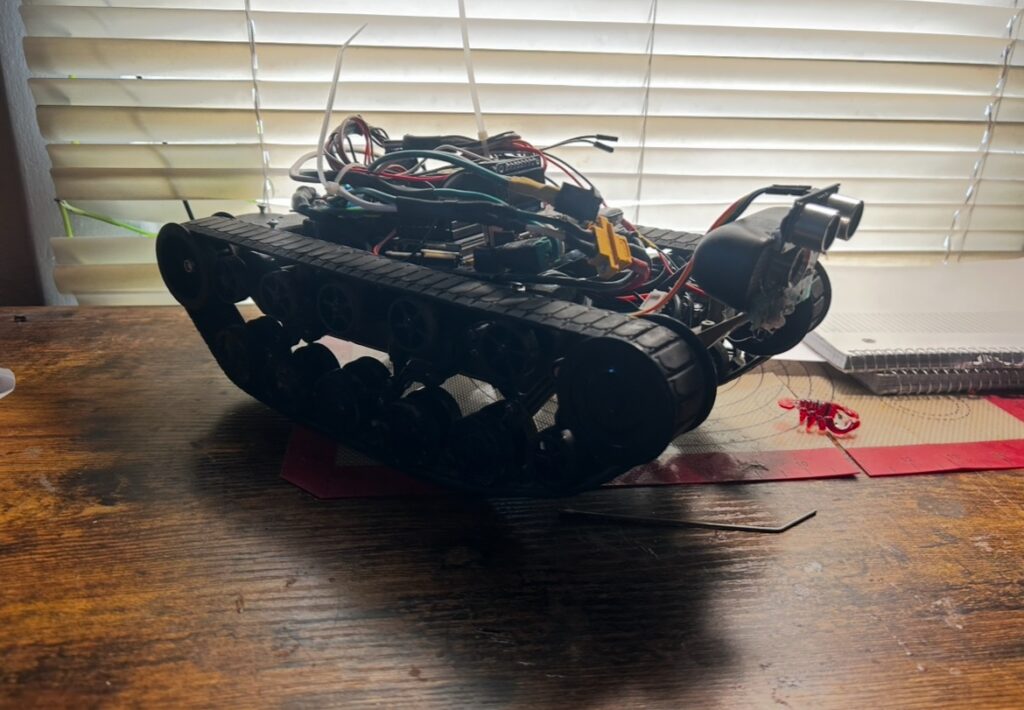
At the same time, I’ve continued working on the COSGC rover project. After simplifying the drivetrain to a skid-steer design, I’ve been focusing on making the system more reliable and practical. A big part of that has been designing a self-righting mechanism, which turned into a deeper dive into torque, leverage, and mechanical advantage than I initially expected.
What started as a simple idea quickly became an exercise in real engineering tradeoffs. Longer arms gave more reach but not enough force, while shorter arms had the opposite problem. That pushed me toward rethinking the geometry and exploring better ways to apply force rather than just increasing power.
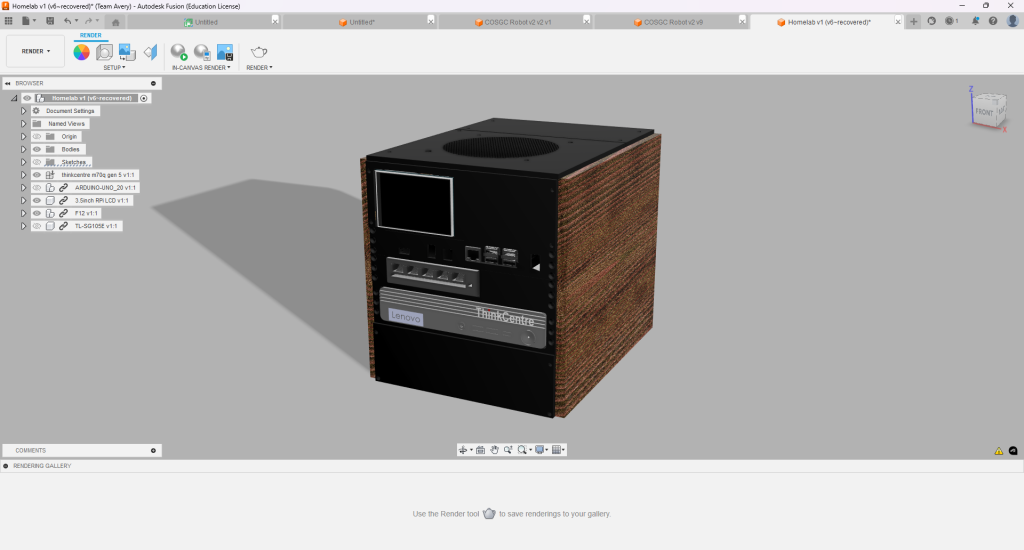
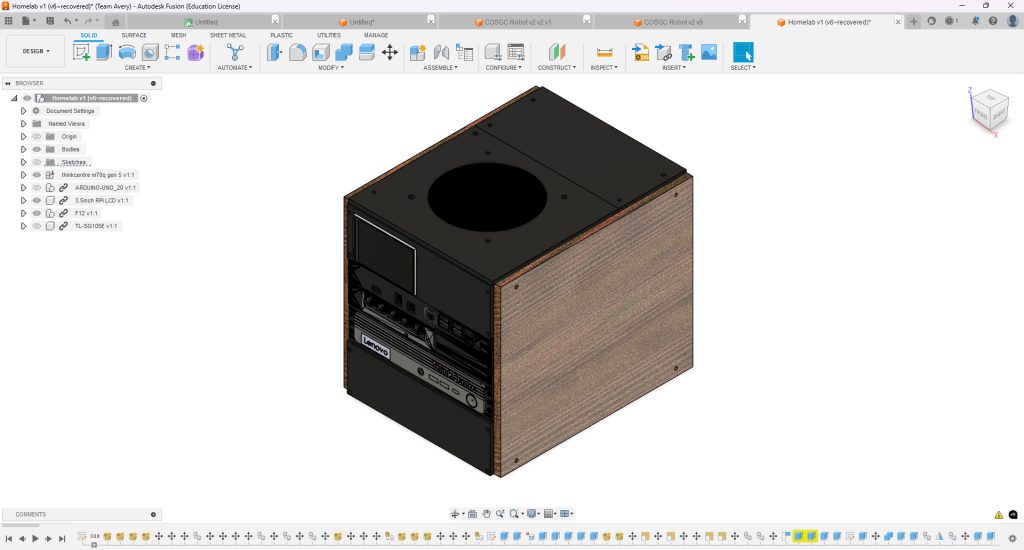
Electronics, Power, and Control
On the electronics side, I’ve been refining control systems using Arduino-based setups and working through proper power distribution. Running a 24V system with buck converters for logic and peripherals has been a big part of this, along with learning how important things like decoupling and bulk capacitance are when motors and servos are involved.
I’ve also been experimenting with using current sensing to estimate load on actuators. It’s a simple concept, but it adds a layer of awareness to the system that opens up better control and protection strategies.
Sensors & Real-World Testing
Another focus has been testing sensors in less-than-ideal environments. Comparing ultrasonic and optical distance sensing highlighted how much conditions like sunlight and uneven terrain can affect performance.
It’s been a good reminder that designs need to work outside of controlled environments, especially for a rover that’s expected to operate on varied surfaces.
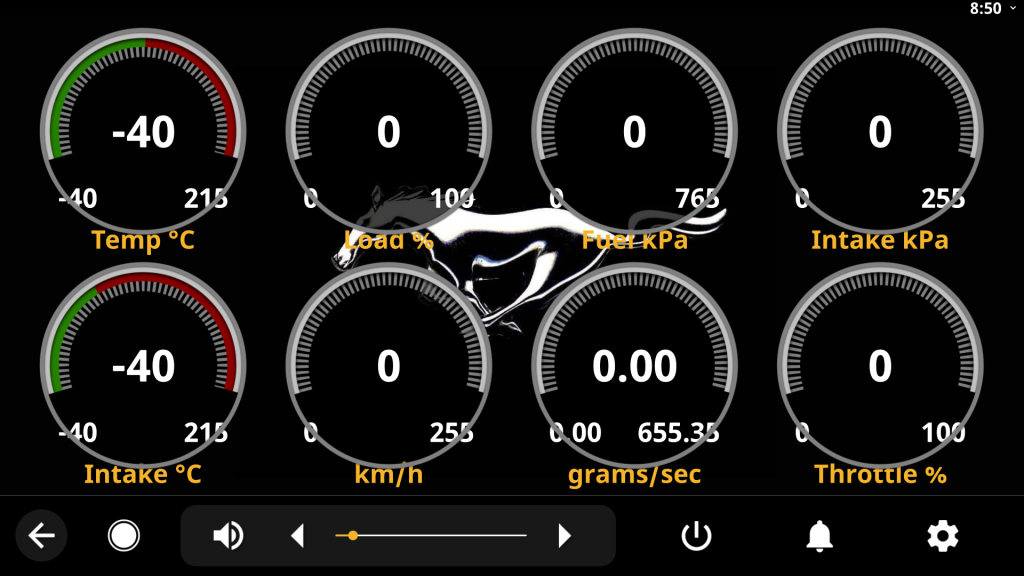
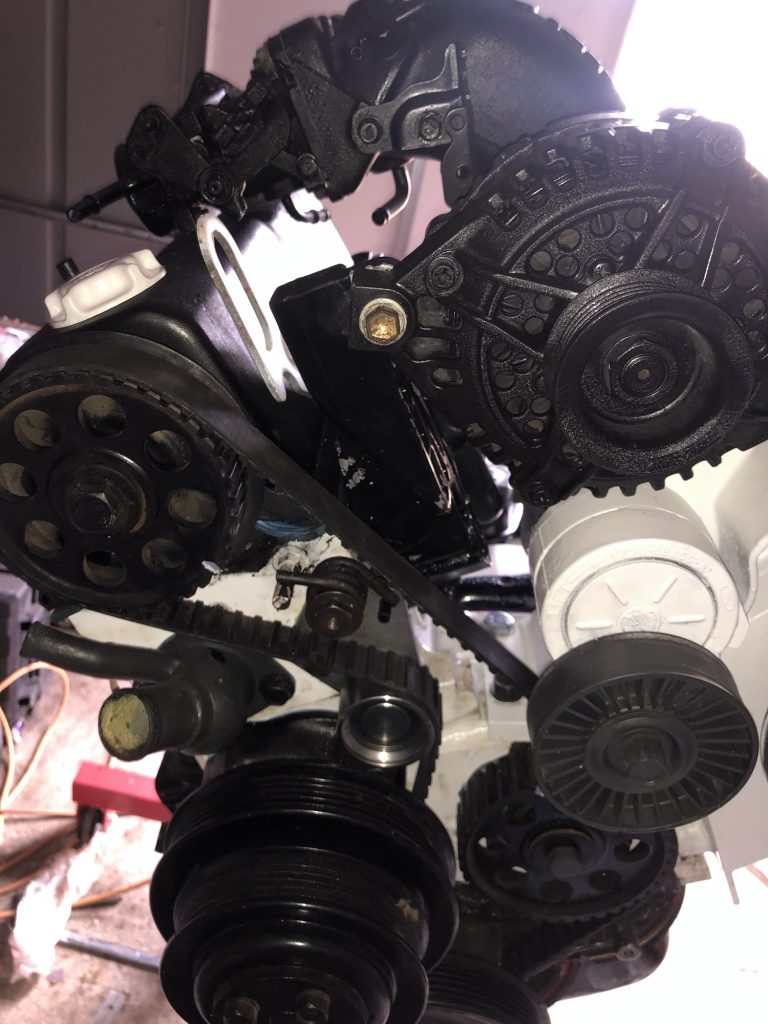
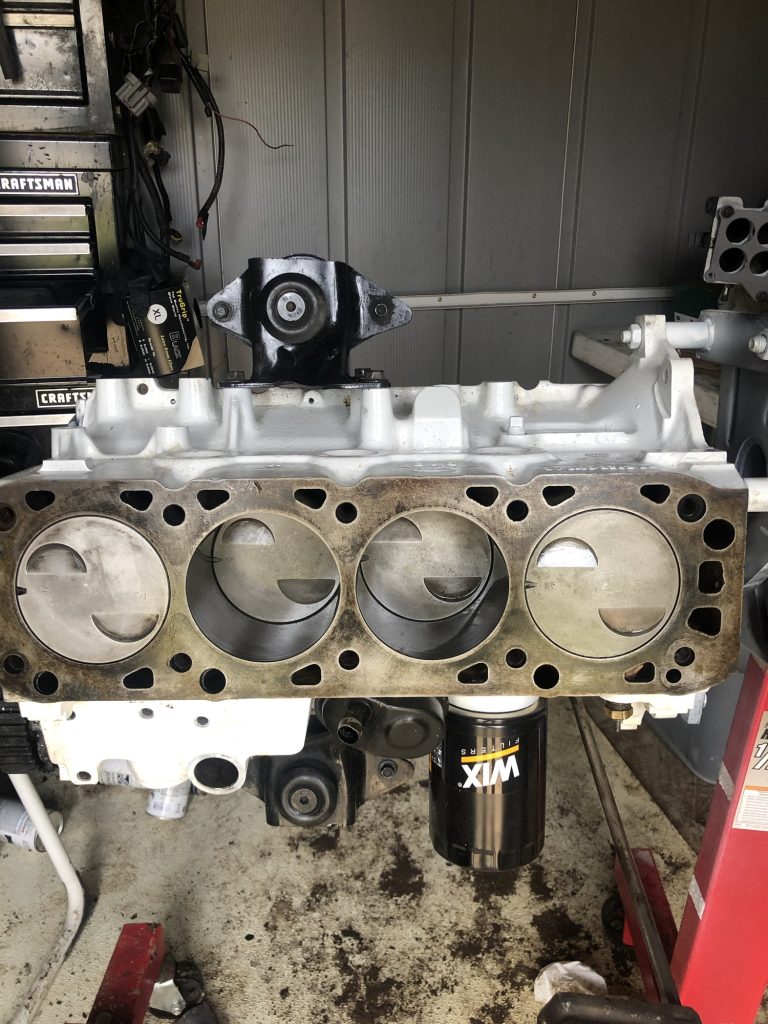
Mustang Project
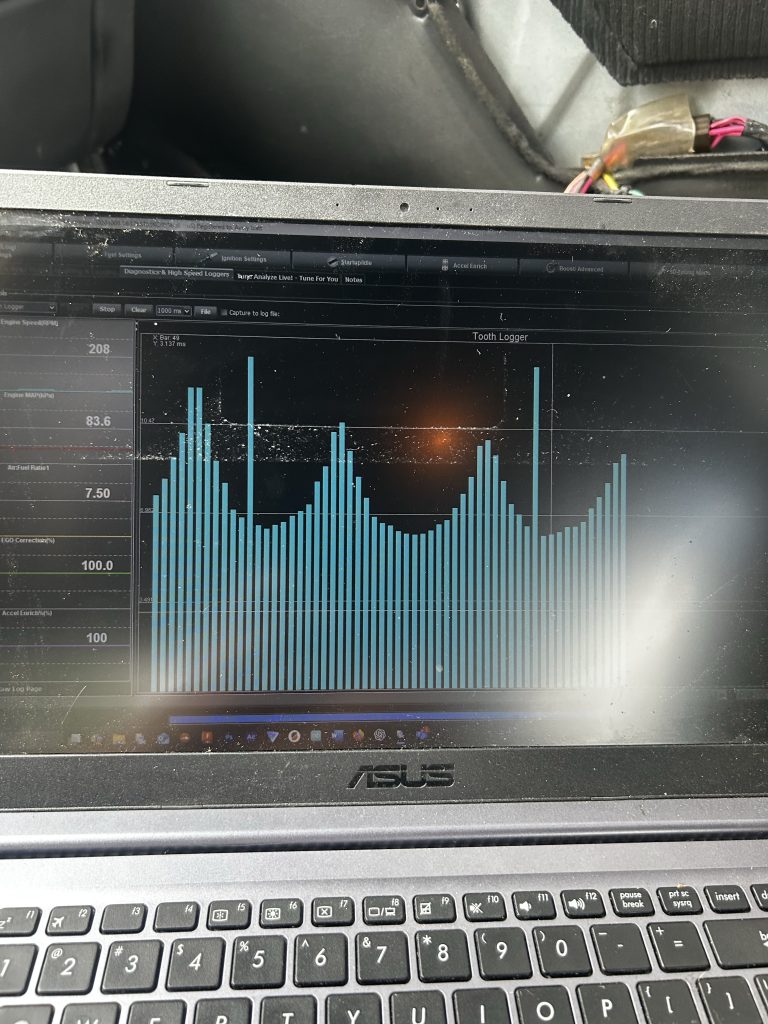
Outside of robotics, I’ve been putting in a lot of work on my 1989 Mustang. After a long process of rebuilding and tuning, the car is now fully running and driving under a self-tuned ECU setup.

Getting it to this point involved dialing in fuel, ignition, and overall system behavior, and it’s been one of the most rewarding parts of the past few months to see it finally come together and operate the way it should.
What I’ve Been Learning
Across all of these projects, the biggest takeaway has been that good engineering isn’t about forcing things to work, it’s about designing them so they work naturally.
Whether it’s managing torque through better geometry stabilizing electronics with proper power design or balancing technical work with leadership responsibilities, the focus has been on building systems that are reliable, not just functional.